DEVELOPMENTGitHub →
Digital Weight
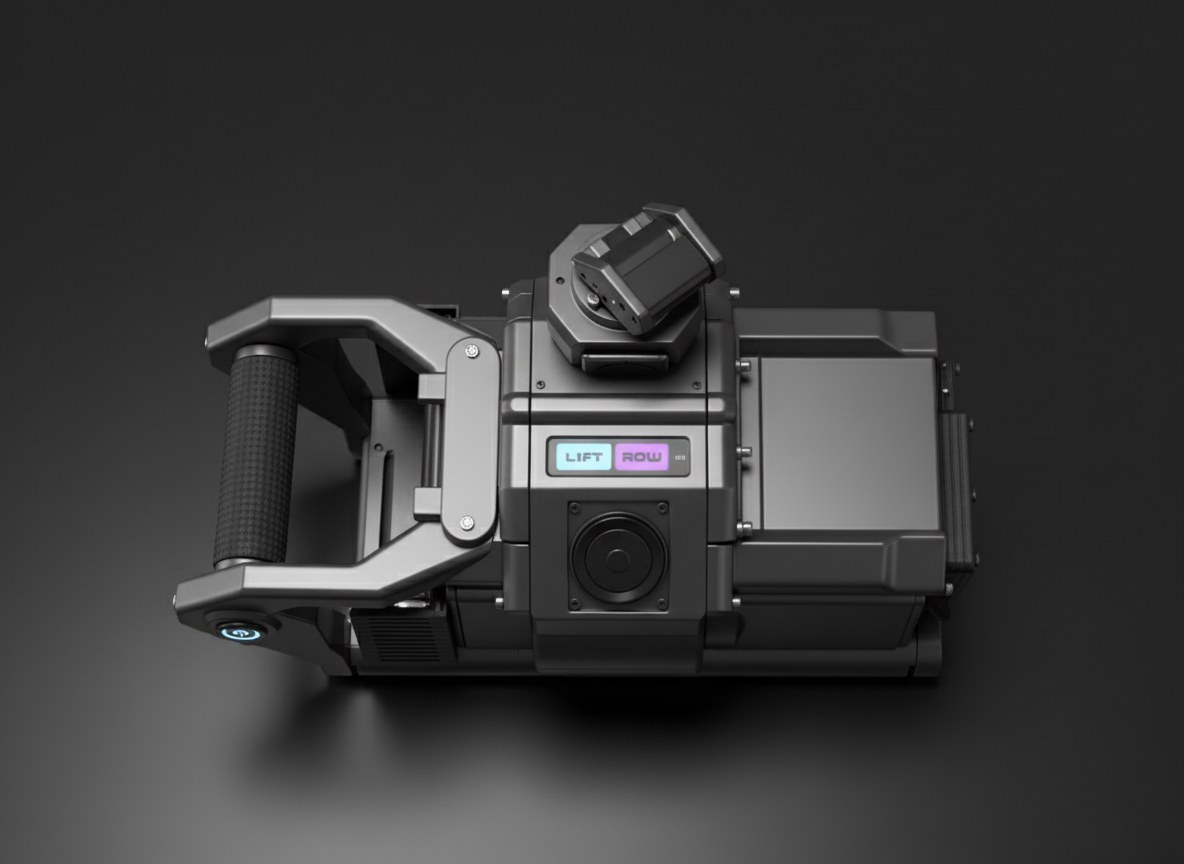
Motorized resistance in a portable package
A compact, motorized resistance device that replaces an entire rack of dumbbells. Uses a brushless DC motor with closed-loop force control to deliver precise, programmable resistance from 5 to 250 lbs across concentric, eccentric, and isometric modes.
- •Replace a full dumbbell rack with one 11 lb device
- •Real-time force feedback via BLE
- •Open source firmware + hardware designs
- •Compatible with standard tool batteries
Specs
Max Force::250 lbs
Weight::11 lbs
Connectivity::BLE 5.0
Modes::Concentric, Eccentric, Isometric
Motor::Brushless DC, 48V
Control Loop::1kHz PID
Battery::16S LiPO4 with BMS (+ tool battery compatible)
Enclosure::3D printed + aluminum frame
Version History
v3prototype
v4prototype
v5development
v6concept
firmware/src/ble_force.cppView on GitHub →
#define FORCE_PIN A0
#define CALIBRATION_FACTOR 0.489f
float readForce() {
int raw = analogRead(FORCE_PIN);
float voltage = raw * (3.3f / 4095.0f);
float lbs = voltage * CALIBRATION_FACTOR * 250.0f;
return lbs;
}
void onBleForceRequest(BLECharacteristic& c) {
float force = readForce();
c.writeValue(force);
}